חוקרים ישראלים פיתחו רובוט סריאלי ראשון מסוגו בעל מנועים ניידים
מאת:
מערכת Telecom News, 17.1.18, 13:19
 ניידות המנועים מאפשרת ייצור רובוט, שמשקלו עשירית ממשקל רובוט רגיל ובעל יכולת תמרון מתקדמת. בין היתר, הוא יכול להשתלב במשימות בשימושים אזרחיים וביטחוניים, למשל, לאיתור ניצולים מתחת להריסות, לחקלאות ולשימוש בתעשיית החלל.
ניידות המנועים מאפשרת ייצור רובוט, שמשקלו עשירית ממשקל רובוט רגיל ובעל יכולת תמרון מתקדמת. בין היתר, הוא יכול להשתלב במשימות בשימושים אזרחיים וביטחוניים, למשל, לאיתור ניצולים מתחת להריסות, לחקלאות ולשימוש בתעשיית החלל.
חוקרים מהמעבדה לביו-רובוטיקה ורובוטיקה רפואית באוניברסיטת בן-גוריון בנגב, בהובלתו של ד"ר
דוד זרוק, ראש המעבדה וחוקר בכיר במחלקה להנדסת מכונות, פיתחו סוג חדש של רובוטים סריאליים.
רובוטים סריאליים הם רובוטים נייחים הדומים במידת מה לזרועות אנושיות ומשמשים לרוב בתעשיות יצרניות מאז שנות ה-70. בשנים האחרונות עולה הביקוש לרובוטים מסוג זה בסקטורים נוספים וחוקרים רבים עוסקים בפיתוחם תוך דגש על ייעול הביצועים והגדלת התפוקה.
בניגוד לשיטת ההרכבה של רובוטים נפוצים אחרים, בהם הורכבו מנועים קבועים על כל מפרק ומפרק של הרובוט, הפיתוח הייחודי של ד"ר
זרוק ותלמידיו -
ליאור דמתי,
משה מן,
גדעון תירוש,
לירן יחזקאל,
אוצר דוראני,
דר זוסמן ו
דנה ארז, מאפשר התקנה של מספר מנועים מצומצם הנעים על גבי חוליות הרובוט לצורך הפעלת המפרק הדרוש לביצוע משימה מסוימת.
התוצאה: זרוע רובוטית קלת משקל, מודולרית ובעלת יכולת שינוי צורה והתאמה למגוון משימות. בשיטה זו, ניתן לקבל רובוט ארוך מהרובוטים הקיימים, תוך הקטנת משקל הרובוט הכולל, גודלו ועלותו.
החיסכון האנרגטי, עלות הייצור המופחתת והמודולריות, מאפשרים להשתמש ברובוט בודד או בקומבינציה של כמה רובוטים כדי לבצע משימות ויישומים בהתאם למידת מורכבותם. לפי החוקרים, מכיוון שהרובוט ניתן להולכה וסידור מחדש תוך כדי תנועה, הוא יכול להשתלב בקלות במגוון משימות בשימושים אזרחיים וביטחוניים.
הרובוט מתאים, בין היתר, למשימות איתור ניצולים מתחת להריסות ולעבודה במקומות סגורים, בשל יכולתו לתמרן בצורה אנכית ובמרחב צר לעומק עשרות מטרים מתחת לפני האדמה.
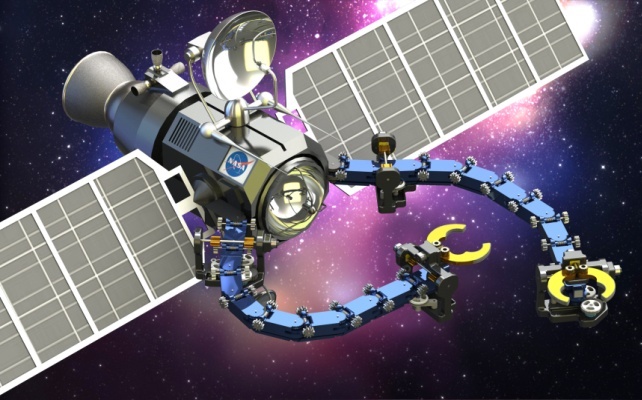
הוא יכול להשתלב במשימות חקלאיות דוגמת קטיף וריסוס. בנוסף, הפיתוח מתאים במיוחד לשימוש בתעשיית החלל, בה המינימליסטיות וחיסכון במשקל מהווים יתרון מובהק. יכולת התמרון של הזרוע הרובוטי ומשקלה הנמוך מקטינים את השפעת התנועה שלה על יציבות החללית. כך למשל, הרובוט יכול לשמש כזרוע שירות ותחזוקה עבור לוויינים.
בעתיד עקרון ניידות המנועים ייושם גם על רובוטים הולכים, דבר העשוי להוזיל את ייצורם ותפוצתם. כעת, שוקדים החוקרים על מזעור הרובוט והפיכתו לתלת-ממדי, תכונות, שתאפשרנה להשתמש בו לצורכי יישום רפואיים חוץ ותוך גופיים.
הרובוט נרשם כפטנט.
ד"ר
זרוק: "פיתחנו רובוט שמתאים למשימות מיוחדות כמו חילוץ מהריסות. למעשה המנוע מתפקד כשריר להשאלה והתוצאה היא רובוט, שניתן לפרק ולהרכיב בפשטות רבה בשטח ולשנות בקלות את מספר החוליות שלו ואת גודלן. בנוסף לכך, ניתן לראשונה להשתמש בניידות המנועים לצורך העברת חלקים ואספקה ממקום אחד לשני לאורך המסילה"
.
סרטון הדמיית ביצועים של הרובוט –
כאן.